SIMULTANEOUS ALIGNMENT OF THREE TLS POINT CLOUDS
In this example three point clouds acquired with a Terrestrial Laserscanner (TLS) are aligned simultaneosly by the ICP algorithm. For this the globalICP class is used.
Contents
Note: You can extract the code from this html file with the matlab function grabcode
Where to get help
Before starting, a short hint on how to access the helpscreen of the methods (=functions) used within this tutorial:
% Help for the constuctor method (for object creation) help globalICP.globalICP % Constructor method for globalICP class. % Help for regular methods help globalICP.addPC % Add a point cloud to globalICP object. help globalICP.plot % Plot all added point clouds. help globalICP.runICP % Run ICP algorithm.
Example script
% Contruct an object of class globalICP (=initialization) icp = globalICP; % Add point clouds to object from ply files % (Added point clouds are saved as mat files, e.g. LionScan1Approx.mat) icp.addPC('RoomScan1.ply'); icp.addPC('RoomScan2.ply'); icp.addPC('RoomScan3.ply'); % Define options for runICP % (A template for all options can be copied by calling 'help globalICP.runICP') ICPOptions.UniformSamplingDistance = 0.2; ICPOptions.PlaneSearchRadius = 0.1; ICPOptions.MaxRoughness = 0.02; % Run ICP! icp.runICP(ICPOptions);
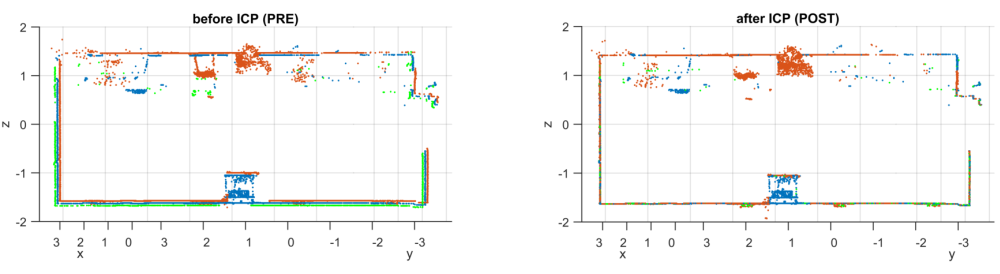
Comparison
This is a cross-section through the scanned interiour before and after using globalICP .