INTRO: WORKING WITH THE POINTCLOUD CLASS IN MATLAB
This document demonstrates the basic usage of the pointCloud class on the basis of 10 short tutorials .
Contents
- Where to get help
- (1) Import of a point cloud WITHOUT attributes and visualize it
- (2) Import a point cloud WITH point attributes and visualize one of them
- (3) Import a point cloud from a matrix
- (4) RGB-colored plot of a point cloud
- (5) Import two point clouds and visualize them in different colors
- (6) Select a subset of points (i.e. filter/thin out point cloud) and export them to a text file
- (7) Calculate normals of a point cloud and visualize them
- (8) Transform a point cloud
- (9) Save and load point cloud
- (10) Create a copy of an object and select a subset of points in it
Note: You can extract the code from this html file with the matlab function grabcode
Where to get help
Before starting, a short hint on how to access the helpscreen of the methods (=functions) used within this tutorial:
% Help for the constuctor method (for object creation) help pointCloud.pointCloud % Import of point cloud data. % Help for regular methods (to apply on the objects properties (=data)) help pointCloud.select % Select a subset of points. help pointCloud.plot % Plot of point cloud. help pointCloud.normals % Compute normal vectors of activated points. help pointCloud.plotNormals % Plot normal vectors of point cloud in 3d. help pointCloud.info % Report informations about the point cloud to the command window. help pointCloud.transform % Coordinate transformation of point cloud. help pointCloud.export % Export activated points to a file. help pointCloud.save % Save point cloud object as mat file. help pointCloud.reconstruct % Reconstruct object only with active points. help pointCloud.copy % Create an indipendent copy of a point cloud object.
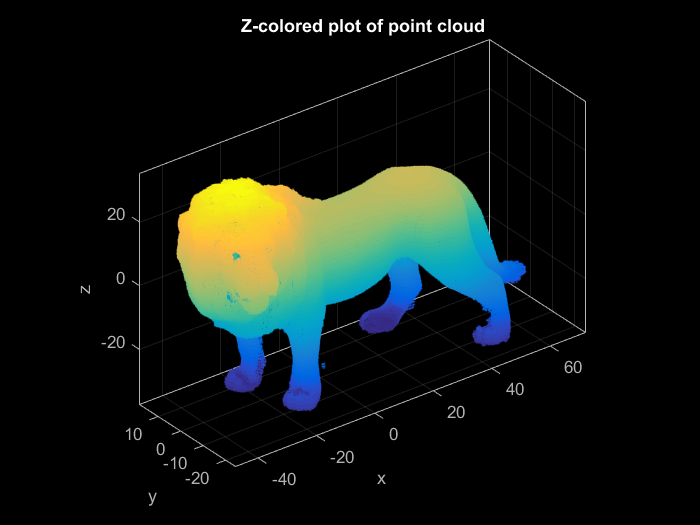
(1) Import of a point cloud WITHOUT attributes and visualize it
clc; clear; close; % clear everything % Import a point cloud from a plain text file (run type('Lion.xyz') to see the contents of the file) pc = pointCloud('Lion.xyz'); % Generate a z-colored view of the point cloud pc.plot; % Set three-dimensional view and add title view(3); title('Z-colored plot of point cloud', 'Color', 'w');
Remember:
- Each method of the pointCloud class (e.g. pc.plot) generates a workspace output .
- Point coordinates x,y,z are saved in the object attribute pc.X
- An information about the point cloud can be displayed with the method pc.info
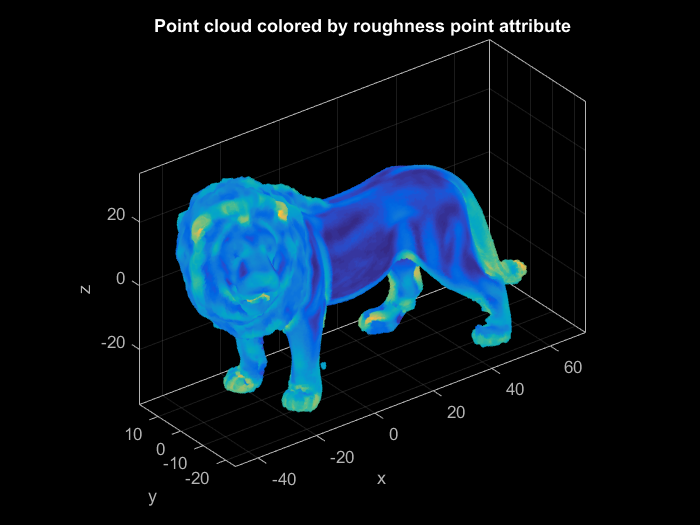
(2) Import a point cloud WITH point attributes and visualize one of them
clc; clear; close; % clear everything % Import point cloud with attributes (nx, ny, nz are the components of the normal vectors) pc = pointCloud('Lion.xyz', 'Attributes', {'nx' 'ny' 'nz' 'roughness'}); % Plot point cloud colored according to imported attribute 'roughness' pc.plot('Color', 'A.roughness', ... % attribute to plot 'MarkerSize', 5); % size of points % Set three-dimensional view and add title view(3); title('Point cloud colored by roughness point attribute', 'Color', 'w');
Remember:
- Point attributes are saved in the object attribute pc.A
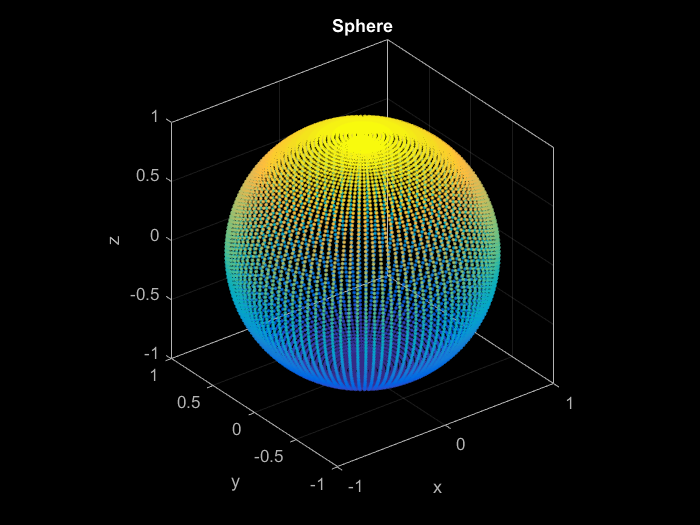
(3) Import a point cloud from a matrix
clc; clear; close; % clear everything % Generate points on a unit sphere [x, y, z] = sphere(100); x = x(:); y = y(:); z = z(:); % Import points and define a label for the point cloud pc = pointCloud([x y z], 'Label', 'sphere'); % Plot point cloud pc.plot('MarkerSize', 5); % Set three-dimensional view and add title view(3); title('Sphere', 'Color', 'w');
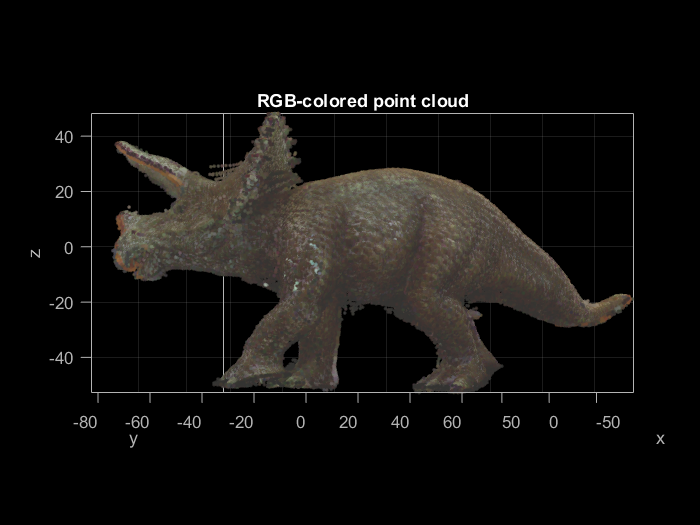
(4) RGB-colored plot of a point cloud
clc; clear; close; % clear everything % Import point cloud with attributes red, green and blue pc = pointCloud('Dino.xyz', 'Attributes', {'r' 'g' 'b'}); % Plot point cloud pc.plot('Color', 'A.rgb', ... % rgb-colored plot 'MarkerSize', 5); % size of points % Set three-dimensional view and add title view(110,0); title('RGB-colored point cloud', 'Color', 'w');
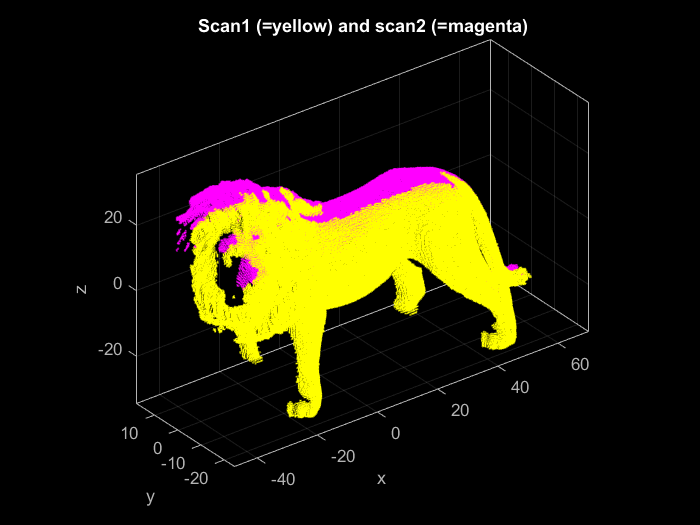
(5) Import two point clouds and visualize them in different colors
clc; clear; close; % clear everything % Import point clouds scan1 = pointCloud('LionScan1.xyz'); scan2 = pointCloud('LionScan2.xyz'); % Plot scan1.plot('Color', 'y'); % yellow scan2.plot('Color', 'm'); % magenta % Set three-dimensional view and add title view(3); title('Scan1 (=yellow) and scan2 (=magenta)', 'Color', 'w');
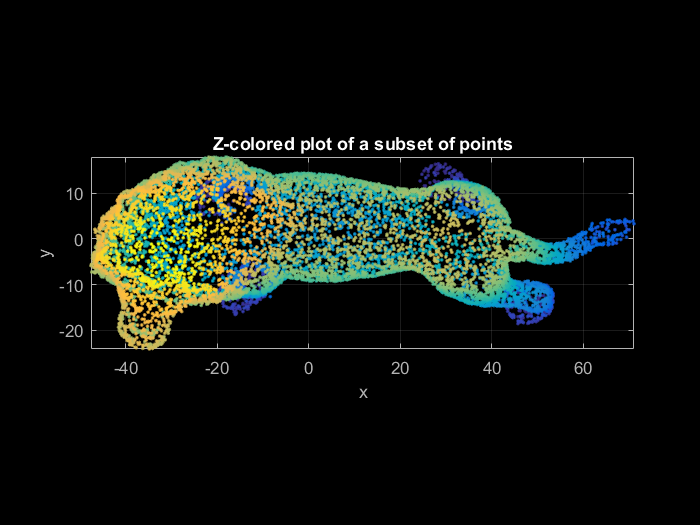
(6) Select a subset of points (i.e. filter/thin out point cloud) and export them to a text file
clc; clear; close; % clear everything % Import point cloud pc = pointCloud('Lion.xyz', 'Attributes', {'nx' 'ny' 'nz' 'roughness'}); % Select a random subset of points pc.select('RandomSampling', 5); % select randomly 5 percent of points % Export selected points to a plain text file with attributes pc.export('LionSubset.xyz', 'Attributes', {'nx' 'ny' 'nz' 'roughness'}); % Plot pc.plot('MarkerSize', 5); % Set title title('Z-colored plot of a subset of points', 'Color', 'w');
Remember:
- The attribute pc.act is a n-by-1 logical vector defining for each point if it is active (true) or not active (false) .
- Most methods apply only on active points .
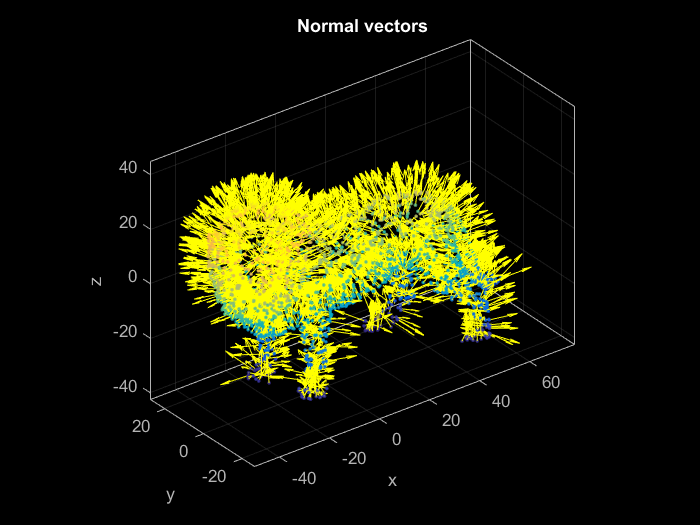
(7) Calculate normals of a point cloud and visualize them
clc; clear; close; % clear everything % Import point cloud pc = pointCloud('Lion.xyz'); % Select a random subset of points pc.select('RandomSampling', 1); % select randomly 1 percent of points % Calculate normals (normals are only calculated for the selected points) pc.normals(2); % search radius is 2 % Plot point cloud and normals pc.plot('MarkerSize', 5); pc.plotNormals('Scale', 10, 'Color', 'y'); % lenght of normals is 10 % Set three-dimensional view and add title view(3); title('Normal vectors', 'Color', 'w');
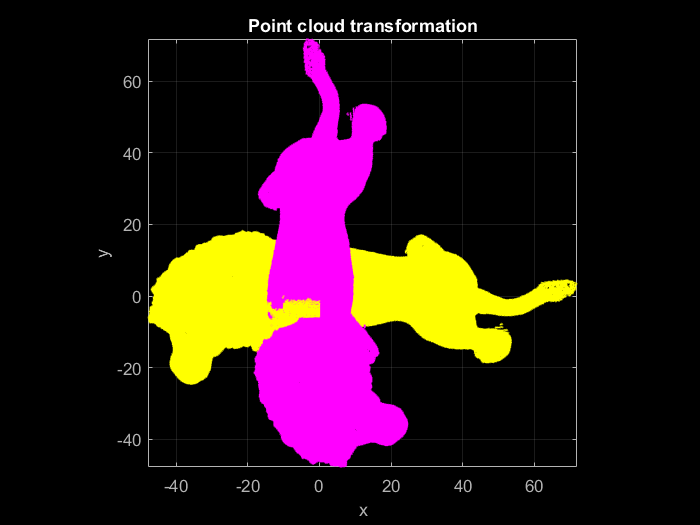
(8) Transform a point cloud
clc; clear; close; % clear everything % Import point cloud pc = pointCloud('Lion.xyz'); % Plot original point cloud pc.plot('Color', 'y'); % Transformation with a rotation angle of 100 gradians about the z axis pc.transform(1, opk2R(0, 0, 100), zeros(3,1)); % opk2R generates a rotation matrix from 3 rotation angles (about the x, y and z axis / units = gradian!) % Plot transformed point cloud pc.plot('Color', 'm'); title('Point cloud transformation', 'Color', 'w');
Remember:
- The transformation model used in this method is:
 (for more information run help pointCloud.transform)
(for more information run help pointCloud.transform)
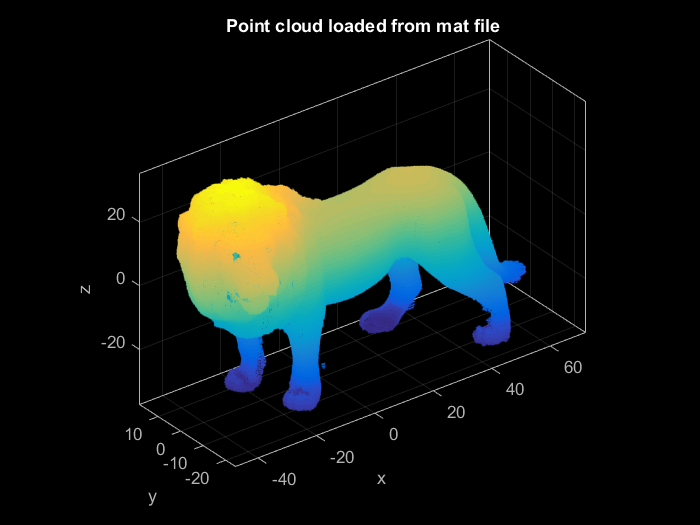
(9) Save and load point cloud
clc; clear; close; % clear everything % Import point cloud pc = pointCloud('Lion.xyz'); % Save to mat file pc.save('Lion.mat'); % Clear point cloud clear pc; % Load point cloud from mat file pcLoaded = pointCloud('Lion.mat'); % Plot pcLoaded.plot; % Set three-dimensional view and add title view(3); title('Point cloud loaded from mat file', 'Color', 'w');
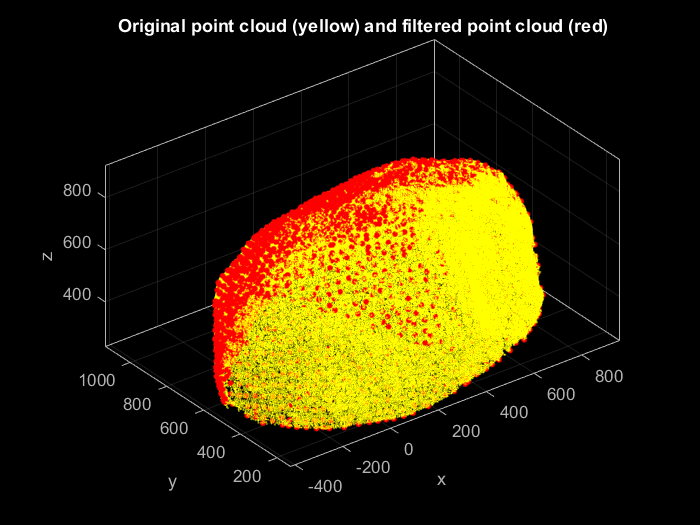
(10) Create a copy of an object and select a subset of points in it
clc; clear; close; % clear everything % Import point cloud pc = pointCloud('Stone.ply'); % attributes from ply file are imported automatically % Create an indipendent copy of the object pcCopy = pc.copy; % Select a subset of points and remove all non active points pcCopy.select('UniformSampling', 40); % uniform sampling with mean sampling distance of 40 mm pcCopy.reconstruct; % Plot both point clouds pc.plot('Color', 'y', 'MarkerSize', 1); pcCopy.plot('Color', 'r', 'MarkerSize', 10); view(3); title('Original point cloud (yellow) and filtered point cloud (red)', 'Color', 'w');