THIN OUT A HUGE POINT CLOUD WITH THE POINTCLOUD CLASS
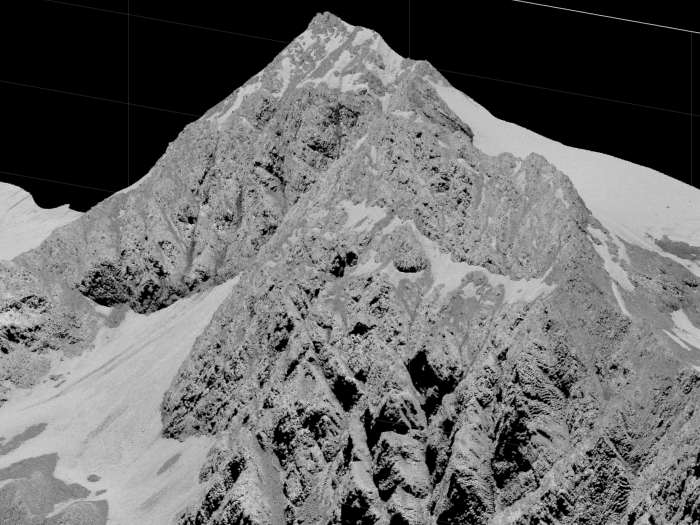
In this tutorial a a huge point cloud (4.5 million points) is filtered with the UniformSampling selection strategy. The point cloud was acquired over the Austrian Alps by Airborne Laserscanning (ALS).
Contents
Note: You can extract the code from this html file with the matlab function grabcode
Import (and plot) point cloud
Note: you have to download the point cloud used within this example from the website.
% Import all 4.5 million points from a laz file pc = pointCloud('ALS_strip.laz'); % Plot all points of point cloud pc.plot('Color' , 'A.intensity', ... % plot intensity of points 'ColorMapName', 'gray', ... % use gray colomap 'MaxPoints' , Inf, ... % maximum number of points is set to infinity, this way all points are visualized! 'MarkerSize' , 1); % small points title('All points', 'Color', 'w'); % Change camera view h = gca; h.CameraPosition = [617770 5169400 7300]; h.CameraTarget = [635750 5192420 3200]; h.CameraViewAngle = 0.91;
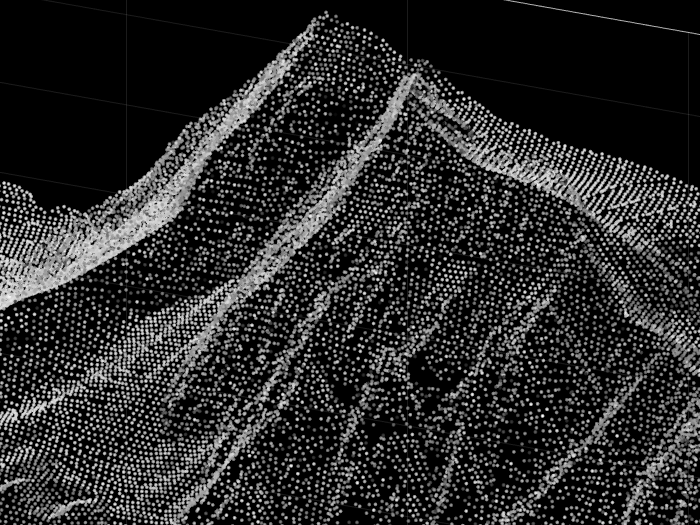
Filter (and plot) point cloud
% Select points with a sampling distance of 10 meter pc.select('UniformSampling', 10); % Plot only the selected points close; % close previous figure pc.plot('Color' , 'A.intensity', ... 'ColorMapName', 'gray', ... 'MaxPoints' , Inf, ... 'MarkerSize' , 5); title('Selected points', 'Color', 'w'); % Change camera view h = gca; h.CameraPosition = [617770 5169400 7300]; h.CameraTarget = [635750 5192420 3200]; h.CameraViewAngle = 0.91;
Export point cloud
% Export the selected points only as ply file (without attributes) pc.export('ALS_strip_selection.ply');